



0 Ft
Termék részletek
DC Motor / Léptetőmotor meghajtó PI-HAT modul alaplapi infravevővel 7V~40V max 5A






DC Motor / Léptetőmotor meghajtó PI-HAT modul alaplapi infravevővel 7V~40V max 5A
- 2 db DC vagy 1 db léptetőmotor vezérlés
- Kompatibilis az összes Raspberry PI modellel (A+/B+/PI2/PI3/ Zero/Zero W)
- Freescale H-Bridge MC33886 kétirányú DC motor vezérlés
- Alaplapi IR vevő távvezérléshez / Robotirányításhoz
- Teljesítmény: 7V-40V / Max 5A
- 5V 2A biztosítása a Raspberry PI-nek
-
DC Motor / Léptető Motor meghajtó PI-HAT modul leírás
A DC motor/Léptetőmotor vezérlő PI-HAT modul segítségével 2 db DC motort vagy 1 db Léptetőmotort vezérelhetünk. Ideális például saját fejlesztésű robot építéséhez. Vagy akár beépítheted például egy régi játékautódba is és könnyedén távvezérelhetővé teheted. De akár komoly CNC eszközt is építhetsz belőle melynek a vezérlését Raspberry PI alapokon oldhatod meg. A rugalmas felhasználást a 7V-40V-ig terjedő bemeneti tápfeszültség lehetősége biztosítja. Azaz nem csupán 5V-os motorokra van korlátozva a fejlesztéseid lehetősége. Nagyobb áramfelvételű (max 5A) motorokat is vezérelhetsz ezzel a modullal. Azért kedveli minden fejlesztő, mert közvetlenül biztosít 5V 2A stabilizált tápfeszültséget a Raspberry PI-nek, így nem kell külön tápot adni neki, hanem a motorokat is tápláló tápegységet lehet felhasználni a Rasberry PI tápellátásához.
Az DC motor/Léptetőmotor vezérlő PI-HAT modulra telepítve van egy infravevő is, így közvetlenül lehet távgvezérelni is a motorokat. A motorok kétirányú (előre/hátra) meghajtásáról a Freescale H-bridge driver MC33886 chip gondoskodik. A tápfeszültség kábelét valamint a motorok kábelét csavarokkal lehet fixen rögzíteni.
Mi van a DC Motor / Léptető Motor meghajtó PI-HAT modul alaplapon:
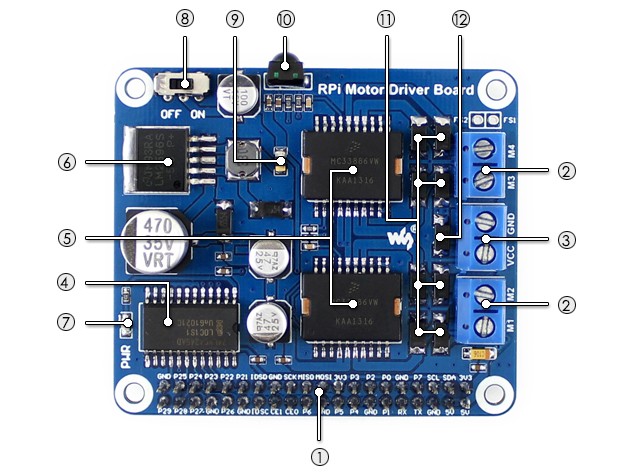
- Raspberry Pi GPIO interface: a Raspberry Pi csatlakoztatásához
- Motor screw terminal: motorok csatlakoztatásához
- Külső táp csatlakozás
- 74LVC4245AD: jelszint illesztő chip, buffer device
- MC33886: motor driver chip
- LM2596-5.0: 5V feszültség szabályzó
- Power indicator LED
- Raspberry Pi tápválasztó kapcsoló
- OFF: Raspberry Pi táplálja a Motor Driver Board-ot
- ON: Motor Driver Board táplálja a Raspberry Pi-t
- 2A self-recovery biztosíték
- IR vevő
- Schottky dióda: motor driver védelmére
- Polaritás védelem dioda
Néhány ötlet a felhasználáshoz:
- Raspberry PI alapú robot építés vezérlés
- Raspberry PI alapú CNC
Technikai adatok
- Supports Raspberry Pi A+/B+/2B/3B
- Freescale H-bridge driver MC33886, controls DC motors to turn in both directions
- Onboard 5V regulator, provides power to Raspberry Pi
- Onboard IR receiver, used for remote control robot
- Multi protection circuit, excellent stability
- 2A self-recovery fuse, keep your Pi safe
- Driver chip features Short-Circuit Shutdown for Large Output Current, Undervoltage Disable Function
- Reversed polarity protection for motor output
- Anti-reverse diode for power supply
- Power input range: 7V~40V
- Single motor output current: up to 5A
- Power supply current for Raspberry Pi: up to 2A
További adatok, példaprogramok
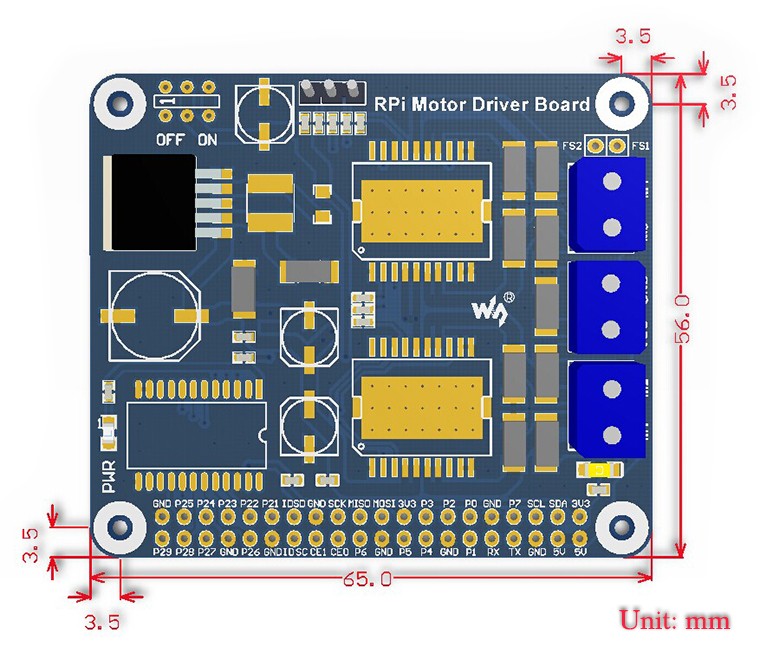
Fizikai méret:
Példakód:
RPi-Motor-Driver-Board-Demo-Code.tar.gz
Részletes leírás:
-

6 748 Ft + ÁFA | Bruttó:8 570 Ft 
9 441 Ft + ÁFA | Bruttó:11 990 Ft 
5 409 Ft + ÁFA | Bruttó:6 870 Ft 
8 654 Ft + ÁFA | Bruttó:10 990 Ft


-
Kompatibilitás PI-4B, PI-3B+, PI-3, PI-2, B+, Zero-W, Zero-WHBrand WaveshareRaktárkészlet NINCSCikkszám RPI-WS11820
Hírek
2026.01.07 10:00
2025.12.18
2022.09.18
2022.05.10
2020.04.06 8:00
2020.03.18
2020.02.27
Továbbiak »
Termékajánló
TOP termékek
Vedd a Neten
