



0 Ft
Blog
2016.01.02 10:08
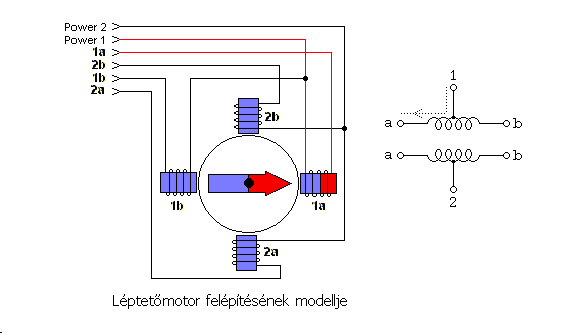
Léptetőmotor illesztése Raspberry PI-hez

Az egyik legizgalmasabb téma a motorok vezérlése Raspberry PI-vel. Ez az alapja mindenféle izgő-mozgó mechanikai feladatnak. Segítségével készíthetünk különféle robotokat, mozgathatunk óramutatót, vagy akár készíthetünk tojásfestő gépet húsvétra. A léptető motor egy olyan elektromágneses eszköz, amely átalakítja a digitális impulzusokat mechanikus, tengely körüli forgássá. Előnye: olcsó, nagy megbízhatóságú, magas forgatónyomaték kis fordulatszámon, és egyszerű masszív szerkezet, mely szinte bármilyen környezetben működik. A léptető motorok precíz pozicionálást tesznek lehetővé anélkül, hogy bármiféle visszacsatolást kellene építeni a pozíció követésére. Folyamatos körforgásra képesek, ellentétben a hagyományos szervómotorokkal.






Hírek
2026.01.07 10:00
2025.12.18
2022.09.18
2022.05.10
2020.04.06 8:00
2020.03.18
2020.02.27
Továbbiak »
Termékajánló
TOP termékek
Vedd a Neten
